

2018年TI杯大学生电子设计竞赛题D-手势识别
2018年TI杯大学生电子设计竞赛
D题:手势识别装置
1.任务
基于TI公司传感芯片FDC2214设计制作一个手势识别装置,实现对猜拳游戏和划拳游戏的判决。该装置也可以直接使用FDC2214 EVM板,要求所使用的FDC2214芯片或者EVM板不得超过2块。
装置具有训练和判决两种工作模式。在判决模式下实验装置能对指定人员进行猜拳游戏和划拳游戏的判决。这里猜拳游戏的判决是指对手势比划“石头”、“剪刀”和“布”的判定,划拳游戏的判定是指手势比划“1”、“2”、“3”、“4”和“5”的判定。在训练模式下能对任意人员进行猜拳游戏和划拳游戏的手势训练,经过有限次训练后,能进行正确的猜拳游戏和划拳游戏的手势判决。
2.要求
(1)装置工作在判决模式下,能对参赛者指定人员进行猜拳判决,给出手势“石头”、“剪刀”和“布”的准确判决,要求每一次判决的时间不大于1秒。 (18分)
(2)装置工作在判决模式下,能对参赛者指定人员进行划拳判决,给出手势“1”、“2”、“3”、“4”和“5”的准确判决,要求每一次判决的时间不大于1秒。 (28分)
(3)装置工作在训练模式下,对任意测试者进行猜拳的手势训练,每种动作训练次数不大于3次,总的训练时间不大于1分钟;然后切换工作模式到判决模式,对被训练的人员进行猜拳判决,要求每一次判决的时间不大于1秒。 (21分)
(4)装置工作在训练模式下,对任意测试者进行划拳的手势训练,每种动作训练次数不大于3次,总的训练时间不大于2分钟;然后切换工作模式到判决模式,对被训练的人员进行划拳判决,要求每一次判决的时间不大于1秒。 (29分)
(5)其他。 ( 4分)
(6)设计报告。 (20分)
项 目 | 主要内容 | 分数 |
系统方案 | 比较与选择,方案系统描述,方案理论分析与计算 | 6 |
电路与程序设计 | 系统原理图和各个部分原理图;系统软件流程图 | 4 |
测试方案与测试结果 | 测试方案合理;测试结果完整;测试结果分析;基本测试仪器 | 6 |
设计报告结构及规范性 | 摘要;正文结果规范;图表的完整性与准确性。 | 4 |
总分 | 20 | |
3. 说明
(1)题目中“指定人员”是参赛队学生自己指定的人员,“任意测试者”是由评审老师临时选择的人员。
(2)FDC2214是基于LC谐振电路原理的一个电容检测传感器。其基本原理如图1所示,在芯片每个检测通道的输入端连接一个电感和电容,组成LC电路,被测电容传感端(图1中灰色标识部分即为被测电容)与LC电路相连接,将产生一个振荡频率,根据该频率值可计算出被测电容值。
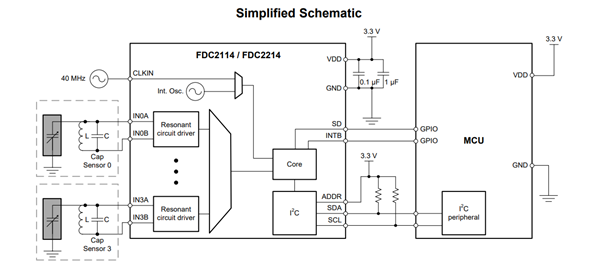
图1 FDC2214传感器基本原理
利用FDC2214的工作原理可实现手势接近和识别的功能,如图2所示,黄色部分称为“FDC2214的传感平面”,该平面为导体材质,当人手接近该导体传感平面时,传感端的电容发生了变化,这就会导致LC电路振荡频率的变化,从而反映出手势接近,以及手势的判定。
(2)基于FDC2214实现手势接近和判决的实验中存在如下的特征:传感平面的面积越大、手势与传感平面的距离越小,感应的频率变化越大,系统会越灵敏,但同时也可能引入越多的噪声。所以在设计该传感平面时,要根据实际情况综合考虑。进一步设计文档可参考如下连接:http://www.ti.com/lit/an/snoa940a/snoa940a.pdf

图2 手势感应示意
为了便于进行训练和判决测试,建议学生作品可以对测试区进行指定,如图3所示。在测试或者训练时要求测试者的手势紧贴在测试板上,建议测试者手势与作品的FDC2214传感器距离不小于1厘米。

图3 手势识别装置的测试示意图
(3)猜拳游戏和划拳游戏手势的具体定义应符合大众认知。对任意测试者进行手势训练时,测试者要遵循学生的指导来进行训练;训练完成后,要在学生的指导下进行手势判决测试。



